Первоначальная настройка
Установка QGroundControl
QGroundControl – программное обеспечение, необходимое для прошивки, настройки и калибровки полетного контроллера.
Скачайте и установите установочный файл для Windows/Linux/macOS с официального сайта QGroundControl. В случае необходимости согласитесь с установкой дополнительных драйверов при установке.
См. также основную документацию по QGroundControl.
MicroSD-карта
Подготовьте MicroSD-карту для полетного контроллера.
Загрузка прошивки в полетный контроллер
- Отключите полетный контроллер от компьютера (если он подключен).
- Запустите программу QGroundControl.
- Перейдите в панель Vehicle Setup (кликнув на логотип QGroundControl в левом верхнем углу) и выберите меню Firmware.
Подключите полетный контроллер к компьютеру по USB.
Для загрузки прошивки:
- Выберите Advanced settings.
- В выпадающем меню выберите Custom firmware file...
- Нажмите OK и выберите скаченный файл прошивки.
Для загрузки последней версии стандартной прошивки сразу нажмите OK.
Дождитесь, пока QGroundControl загрузит прошивку и выполнит перезагрузку полетного контроллера.
Не отключайте полетный контроллер от компьютера в процессе загрузки прошивки.
Настройка полетного контроллера
Все дальнейшие настройки и калибровки полетного контроллера могут быть выполнены без проводов с применением доступа к полетному контроллеру по Wi-Fi через Raspberry Pi.
Обзор главного окна настроек QGroundControl:
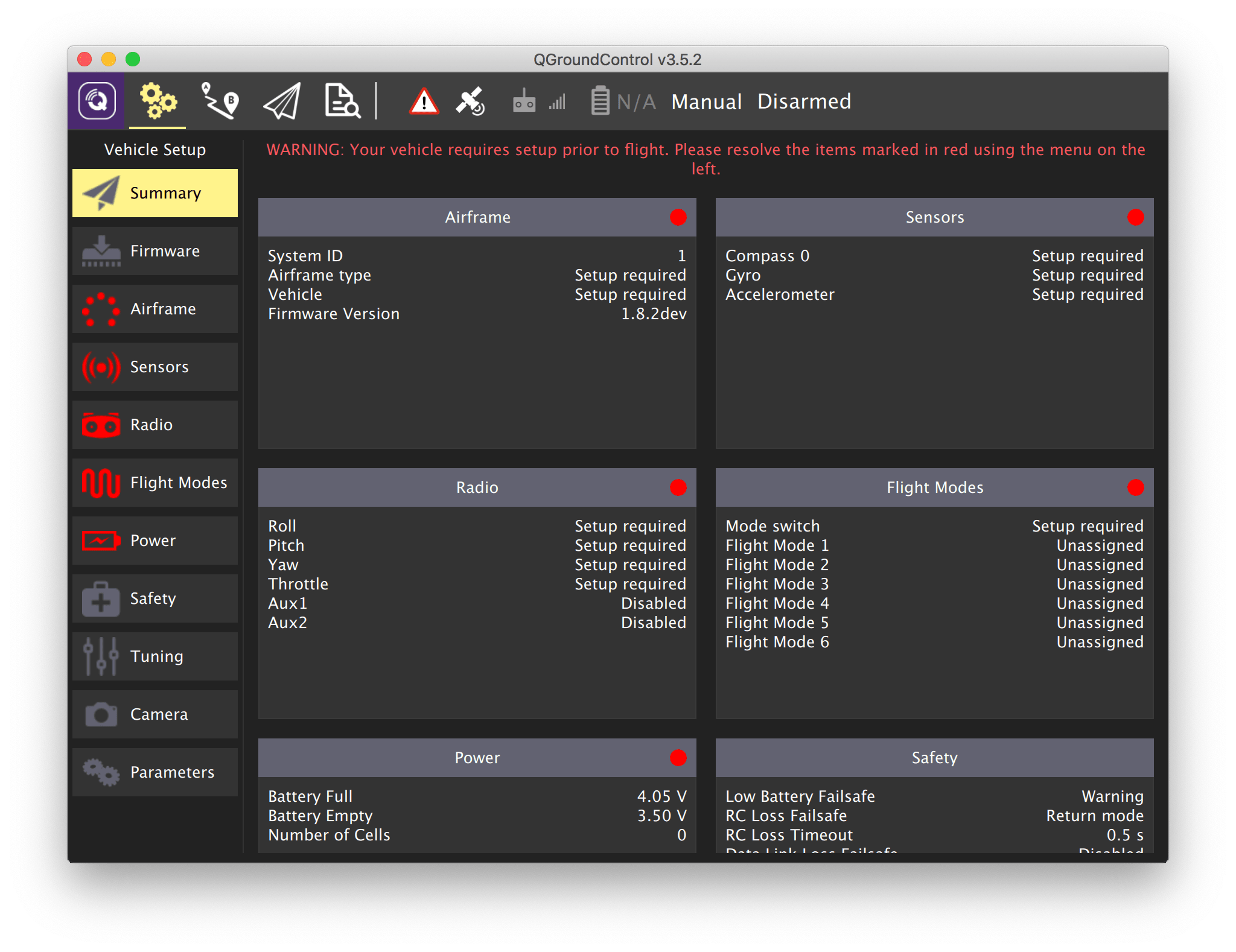
- Параметры, нуждающиеся в настройке: Airframe, Radio, Sensors, Flight Modes.
- Текущая прошивка контроллера.
- Текущий полетный режим.
- Сообщения об ошибках.
Выбор рамы
- Зайдите во вкладку Vehicle Setup.
- Выберите меню Airframe.
- Выберите тип рамы Quad H.
- Переместитесь в начало списка и нажмите кнопку Apply and Restart, подтвердите нажатием Apply.
- Дождитесь применения настроек и перезагрузки полетного контроллера.
Настройка PID-регуляторов
Усредненные коэффициенты PID для конструктора мультироторного типа
MC_PITCHRATE_P= 0.140MC_PITCHRATE_I= 0.090MC_PITCHRATE_D= 0.0008MC_ROLLRATE_P= 0.140MC_ROLLRATE_I= 0.100MC_ROLLRATE_D= 0.0006
Усредненные коэффициенты PID для конструктора самолетного типа
MC_PITCHRATE_P= 0.179MC_PITCHRATE_I= 0.150MC_PITCHRATE_D= 0.002MC_ROLLRATE_P= 0.195MC_ROLLRATE_I= 0.170MC_ROLLRATE_D= 0.002
Необходимо учитывать, что для идеального полета параметры PID-регуляторов подбираются вручную для каждого конкретного собранного дрона. Вы можете узнать больше об этом в статье "Настройка PID-регуляторов".
Далее: Калибровка датчиков.